Developer Overview of Drydock
The core objective of Drydock is to fully deploy physical servers based on a declarative YAML topology. The actual provisioning work is completed by a downstream 3rd party tool managed by a pluggable driver. The initial use-case is Canonical MAAS.
Architecture
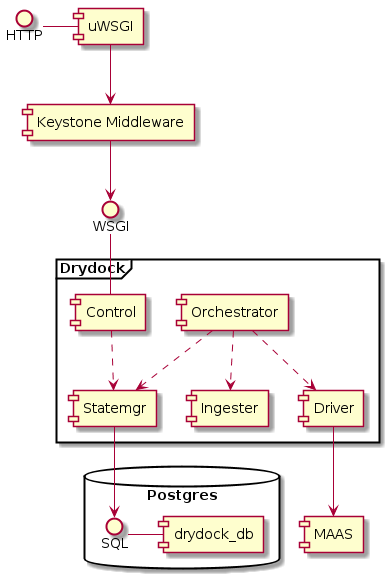
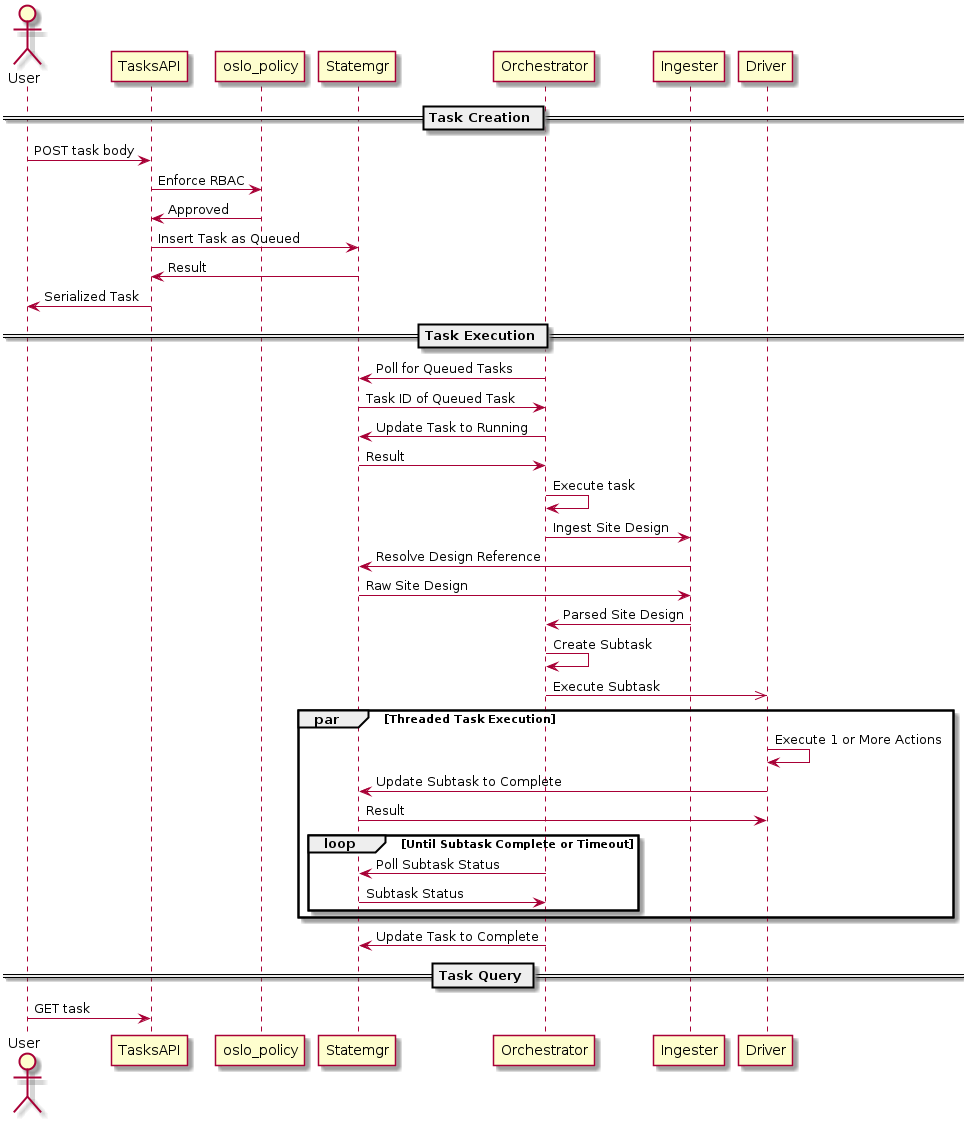
At a very high level Drydock is a very simple workflow engine fronted by a RESTful API and maintains state in a Postgres relational database. Clients create a task via the API that defines two main attributes of an action and a reference to a site design or topology. The Drydock orchestrator will asynchronously execute the task while the client polls the API for task status. Once execution is complete, the task status is updated with results and the orchestrator will move to the next queued task.
Components
Control
The control module is simply the RESTful API. It is based on the
Falcon Framework and utilizes oslo_policy
for RBAC enforcement of the API endpoints. The normal deployment of Drydock
uses uWSGI and PasteDeploy
to build a pipeline that includes Keystone Middleware for authentication
and role decoration of the request.
Statemgr
The statemgr module is the interface into all backing stores for Drydock.
This is mainly a Postgres, but Drydock
also uses the state manager for accessing external URLs to ingest site designs.
Interactions with Postgres use the core libraries of
SQLAlchemy (not the ORM).
Ingester
The ingester module is basically a pluggable translator between external site definitions
(currently supports YAML formats) and the internal object model. Most of the internal object
model utilizes oslo_versionedobjects, much to my regret.
Orchestrator
The orchestrator module is the brain of the task execution. It requests queued tasks
from the state manager and when one is available, it executes it. The orchestrator is
single-threaded in that only a single user-created task is executed at once. However, that
task can spawn many subtasks that may be executed concurrently depending on their synchronization
requirements. For some actions, the orchestrator creates subtasks that are handed off to the
driver for execution. A common question about this module is why Drydock doesn’t use Celery
as a task management engine. The simple answer is that it wasn’t considered due to unfamiliarity
at the time.
Driver
The driver module is a framework that supports pluggable drivers to execute task actions. The
subtle difference between the driver and orchestrator modules is the orchestrator manages
a wide scope of task execution that may cross the boundaries of a single driver plugin. Each driver
plugin is more focused on using a single downstream tool to accomplish the actions.
Developer Workflow / Test Cycle
Because Airship is a container-centric platform, the developer workflow heavily utilizes containers for testing and publishing. It also requires Drydock to produce multiple artifacts that are related, but separate: the Python package, the Docker image and the Helm chart. The code is published via the Docker image artifact.
Drydock strives to conform to the Airship coding conventions.
Python
The Drydock Python codebase is under /drydock_provisioner and the testing is under /tests. The
developer tools expect to run on Ubuntu 16.04 and you’ll need GNU make available. With that you
should be able to use make targets for testing code changes:
make pep8- Lint the Python code against the PEP8 coding standard
make unit_tests- Run the local unit tests
make security- Scan the code with Bandit
make coverage_test- Run unit tests and Postgres integration tests
Docker
The Drydock dockerfile is located in /images/drydock along with any artifacts built specifically
to enable the container image. Again make targets are used for generating and testing the artifacts.
make images- Build the Drydock Docker image. See Makefile Options below.
make run_images- Build the image and then run a rudimentary local test
Helm
The Drydock helm chart is located in /charts/drydock. Local testing currently only supports linting
and previewing the rendered artifacts. Richer functional chart testing is a TODO.
make helm_lint- Lint the Helm chart
make dry-run- Render the chart and output the Kubernetes manifest YAML documents
Makefile Options
The Makefile supports a few options that override default values to allow use behind a proxy or for geneting the Docker image with custom tags.
DOCKER_REGISTRY- Defaults toquay.io, used as the Docker registry for tagging images
IMAGE_NAME- Defaults todrydock, the image name.
IMAGE_PREFIX- Defaults toairshipit, the registry organization to push images into
IMAGE_TAG- Defaults todev, a tag to apply to the image
PUSH_IMAGE- Defaults tofalse, set totrueif you want the build process to also push the image. Likely will require you have previously rundocker login.
PROXY- A HTTP/HTTPS proxy server to add to the image build environment. Required if you are building the image behind a proxy.
USE_PROXY- Defaults tofalse, set totrueto include thePROXYconfiguration above in the build.